Por una conducción autónoma segura y confiable: los avances del IBV dentro del Proyecto Medusa
28 junio 2025.
Autor/es: Luis I. Sánchez Palop, Begoña Mateo Martínez, José Solaz Sanahuja, Elisa Signes i Pérez
Instituto de Biomecánica (IBV)
El 30 de junio de 2025 la Red MEDUSA, liderada por el Instituto de Biomecánica (IBV), llegó al final de su andadura. El proyecto, enmarcado dentro del Programa Cervera de Redes de Excelencia financiado por CDTI, ha contado con la participación de otros tres centros tecnológicos españoles: CTIC (Asturias), IKERLAN (País Vasco) y TECNALIA (País Vasco).
Durante este tiempo, la Red ha trabajado conjuntamente en el desarrollo de diferentes tecnologías relacionadas con el ámbito de la Movilidad Autónoma Conectada y Cooperativa (CCAM, de sus siglas en inglés Connected Cooperative Automated Mobility) en todos los elementos que la componen: sensorización para conocer qué sucede en el interior (pasajeros) y exterior del vehículo (situación del resto de agentes de la vía y la infraestructura), comunicaciones entre vehículos y la infraestructura, y gestión de los datos generados.
El factor diferencial de la Red MEDUSA ha sido poner al Factor Humano y la persona usuaria en el centro de todo este proceso de innovación, desde el desarrollo de tecnologías que permitan conocer el estado de las personas dentro del vehículo hasta la ética del dato para garantizar que el uso que se hace de la información generada es adecuado.
En el caso del IBV, ha servido para avanzar en cuatro grandes líneas de trabajo: mejora de su simulador de conducción HAV (Human Autonomous Vehicle) para una mejor integración de la persona conductora/pasajera en el diseño de CCAM, optimización de la caracterización de la persona y su estado emocional y cognitivo dentro del vehículo, desarrollo de un laboratorio de peatones en Realidad Virtual como parte del Entorno Inmersivo de Movilidad que permita analizar el comportamiento de peatones, y el desarrollo de metodologías de diseño del interior del vehículo que tengan en cuenta las nuevas actividades que se podrán realizar dentro de los vehículos autónomos.
Los avances del IBV y los realizados por CTIC, IKERLAN y TECNALIA contribuirán a una nueva movilidad que tenga el Factor Humano como elemento central en su diseño, de manera que impacte de manera positiva en la sociedad en su conjunto, tanto en sus usuarios como en el resto de personas que interaccionan con ella.
INTRODUCCIÓN
El trabajo realizado por el IBV dentro de la Red MEDUSA se ha centrado en la identificación, recopilación y desarrollo de técnicas y herramientas de Factores Humanos aplicadas al vehículo autónomo, con el objetivo de poner a la persona en el centro del desarrollo de la nueva movilidad autónoma CCAM.
Así, se ha realizado un extenso análisis de la experiencia del sujeto en entorno controlado de laboratorio, tanto en el simulador de conducción HAV como en entornos de Realidad Virtual. A partir de éste, se han identificado diferentes metodologías que permitan avanzar hacia el desarrollo del vehículo autónomo empático, que se adapte a las personas en su interior optimizando la experiencia de uso.
En concreto, se ha trabajado en las siguientes líneas de investigación:
- Mejora del entorno de simulación HAV para la integración de la persona, ya sea en el rol de conductor o de pasajero, en el diseño de la conducción autónoma en todos los niveles de automatización.
- Metodologías de diseño de cabina centrado en el pasajero para un vehículo más empático, teniendo en cuenta las diferentes necesidades de las personas y de las actividades a realizar en el vehículo.
- Desarrollo del laboratorio de peatones dentro del Entorno Inmersivo de Movilidad en Realidad Virtual para la integración de las personas en el rol de peatón en el comportamiento de coche autónomo, permitiendo así el avance en la empatía al vehículo con otros usuarios de la vía.
- Mejora del sistema de registro de señales fisiológicas VitalWise, desarrollado por el IBV, y de los algoritmos de caracterización del estado cognitivo y emocional para su empleo en el interior del vehículo, en entorno real.
A continuación, se detallan los resultados obtenidos por el IBV desde el inicio del proyecto, en noviembre de 2023, hasta su finalización en junio de 2025.
HUMAN AUTONOMOUS VEHICLE HAV, UN SIMULADOR PARA INCORPORAR A LA PERSONA EN EL DISEÑO DE LA NUEVA MOVILIDAD
La primera línea de innovación en la que se ha trabajado dentro de la Red MEDUSA ha sido la mejora de la inmersividad del Human Autonomous Vehicle (HAV), un simulador de conducción desarrollado por el IBV. HAV permite emular el comportamiento de un vehículo en carretera para cualquier nivel de automatización, desde un vehículo tradicional (lo que se conoce como nivel L1) en el que la persona al volante se encarga enteramente del control, a un vehículo completamente automatizado (L5).
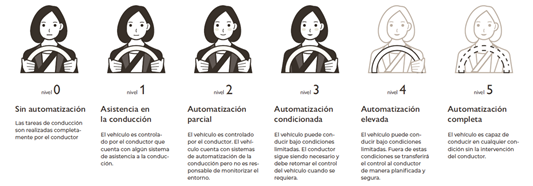
Figura 1. Niveles de automatización de la conducción.
Para lograr el elevado nivel de realismo del simulador, éste se compone de una plataforma dinámica, que traslada las aceleraciones del vehículo a la persona, tres pantallas de 55” para representar el entorno de simulación de forma inmersiva y envolvente, y un entorno de conducción (volante, pedales, asiento…) para el control. Todo ello permite al usuario sumergirse en la simulación de la conducción, que se realiza empleando el software open–source CARLA, que permite tanto el diseño como la reproducción de los escenarios en los que se mueve el vehículo.
Así, HAV constituye una herramienta de gran utilidad para el desarrollo y validación de diferentes tecnologías, desde ADAS (ayudas a la conducción), HMI (interfaces persona máquina) en los que representar información, hasta el propio comportamiento del vehículo autónomo (estilo de conducción, forma en la que informar a las personas, avisos para retomar el control, etc.).
Durante esta iniciativa, el IBV ha abordado una mejora en la inmersividad proporcionada por el simulador en dos aspectos clave: el realismo del puesto de conducción y de la dinámica de la plataforma de fuerzas para la simulación del movimiento.
En el primer aspecto, se ha trabajado en diseñar un entorno de conducción que simule el cockpit o interior de un turismo, con pantallas HMI integradas de un modo más realista. Así, se ha pasado de un entorno en el que los diferentes elementos (volante, asiento…) representaban fielmente las sensaciones de conducción, pero con un aspecto más cercano a un entorno de gaming que de un vehículo real, a un interior más reconocible por los conductores.
El nuevo diseño está compuesto por un carenado que consta de un panel frontal que integra, por una parte, los componentes relacionados con la regulación del volante y, por otra, permite sostener las pantallas de información del usuario tanto frontal (“Instrument Panel”) como lateral (consola), que permiten interactuar con el usuario programando de manera flexible diferentes eventos visuales y accionables. Además, se ha añadido un reposabrazos lateral que integra otros componentes de control para el usuario, tal y como sucede en los vehículos reales, así como una seta de emergencia que permita detener la simulación en caso de peligro. Por último, se han incluido una plataforma y paneles laterales que sostienen toda la estructura a la plataforma dinámica del simulador y proporciona una mayor estabilidad de todos los componentes.

Figura 2. Nuevo diseño del entorno del simulador HAV.
En cuanto a la mejora del modelo dinámico, anteriormente se venía trabajando con el modelo vehicular de NVIDIA’s PhysX incluido en el propio software de simulación CARLA. Sin embargo, en pruebas realizadas en proyectos anteriores por el IBV se identificaron problemas de falta de realismo y cinetosis (mareos), ya que CARLA no está concebido para la simulación con personas al volante. La integración del modelo es clave ya que el movimiento percibido por la persona en el simulador debe de ser ajustado mediante la percepción subjetiva de la dinámica ofrecida en condiciones de simulación. Por ese motivo se ha optimizado el compromiso entre precisión en la dinámica con los tiempos de ejecución. Este compromiso es clave en la mejora de la cinetosis mediante la sincronización de la información visual y vestibular, así como en el realismo del movimiento del vehículo simulado.
Para la mejora de este modelo se ha realizado una colaboración externa con el departamento de Advanced Vehicle Dynamics and Mechatronic Systems (VEDYMEC) de la Universidad Carlos III para mejorar el modelo dinámico encargado de realizar los cálculos para obtener las aceleraciones del vehículo.
Para ello se ha realizado una comparativa para caracterizar el estado actual del modelo dinámico de CARLA frente a otros modelos dinámicos vehiculares. Las carencias detectadas se han tenido en cuenta para decidir la utilización de un modelo de dinámica que priorice aquellos parámetros clave en el realismo de la simulación con usuarios. Gracias a este estudio se ha desarrollado un nuevo modelo dinámico, integrado en el simulador HAV.
ENTORNO INMERSIVO DE MOVILIDAD: LABORATORIO DE PEATONES
Por otra parte, en el desarrollo del vehículo autónomo centrado en la persona es necesario incorporar otros roles relacionados con el entorno de conducción autónoma más allá de los ocupantes de los vehículos. En las calles y las carreteras no sólo circulan vehículos de motor, también hay bicicletas, patinetes, peatones…
Es por ello que resulta imprescindible entender cómo se comportan estos otros agentes de la infraestructura, que además son los más vulnerables, tanto para poder mejorar el realismo de las simulaciones – las que se realizan en el HAV- como para modelar el comportamiento de los algoritmos que controlan los vehículos autónomos. En este sentido los algoritmos de conducción autónoma deben de ser entrenados con datos precisos sobre cómo se mueven los peatones para mejorar su capacidad de detección y respuesta en tiempo real. Además, las empresas deben demostrar que sus sistemas pueden operar de manera segura en entornos urbanos con presencia de peatones.
Analizar patrones de movimiento del peatón ayuda a anticipar sus acciones, generar datos sintéticos para entrenamiento y así mejorar la toma de decisiones del vehículo. Sin embargo, hay que tener en cuenta que los peatones no caminan igual, sino que, dependiendo de la persona, edad y otros factores varían su comportamiento, también corren, se detienen, usan dispositivos móviles o pueden cruzar en lugares no permitidos. Un sistema autónomo debe reconocer estas variaciones para reaccionar adecuadamente. Por ello, es necesario recoger datos realistas del comportamiento de los peatones.
Para poder entender cómo reaccionan los peatones o los ciclistas a determinadas situaciones de tráfico, comportamiento de vehículos e incluso diseño de las calles o de las señales de tráfico, es de gran utilidad poder realizar pruebas que involucren a estos ocupantes de la vía. Sin embargo, realizar pruebas en entorno real puede llegar a ser conflictivo, tanto por la seguridad de las personas que participen como por la dificultad de probar diferentes configuraciones de tráfico, señalética, iluminación, condiciones climáticas, etc.
Así, resulta clave poder contar con una herramienta que permita simular, en condiciones seguras y controladas, el comportamiento de peatones y ciclistas, al igual que el simulador de conducción HAV permite superar estas limitaciones en el ámbito de la simulación del comportamiento del vehículo. Para dar respuesta a esta necesidad de caracterización y modelado de la respuesta del peatón, desde el IBV se ha desarrollado el laboratorio de peatones, que se enmarca dentro del bautizado como Entorno Inmersivo de Movilidad, que en el futuro integrará también a otros agentes como ciclistas o patinetes.
En este sentido, dentro de la Red MEDUSA se ha puesto en marcha un laboratorio inmersivo, empleando gafas de Realidad Virtual, que se centra en el comportamiento de los peatones, en concreto la interacción vehículo-peatón e infraestructura-peatón, para la incorporación del estudio del comportamiento del mismo.
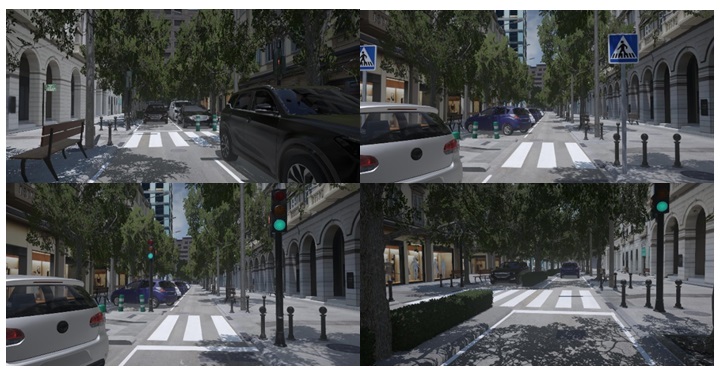
Para la definición de requisitos del laboratorio se han analizado las variables referentes al peatón que es necesario recoger. Se han estudiado cuales son los principales factores que influyen en el comportamiento de éste, así como las variantes constructivas de la infraestructura (pasos de peatones, señales de tráfico y semáforos, presencia de bolardos, etc.) para definir las características y elementos presentes en los diferentes escenarios de realidad virtual que se recrearán en el laboratorio. El objetivo es lograr que los escenarios inmersivos que la persona está visualizando dentro de la realidad virtual permitan representar la interacciones clave entre vehículo, infraestructura y peatón.
Figura 3. Entorno de simulación desarrollado para el Laboratorio de Peatones.
El laboratorio consta además de un sistema sin contacto para la captura de movimientos – Captury – que dispone, además, de módulos específicos para poder analizar los gestos realizados con las manos. Empleando las gafas de realidad Meta Quest Pro para representar el entorno inmersivo se sincroniza el registro de movimientos de la persona, dónde está mirando y qué está sucediendo en la simulación, ya que estas gafas permiten acceso a los datos eye-tracking. Este aspecto es clave, ya que conocer la dirección de la mirada de la persona es un factor esencial en la comprensión de la intencionalidad del peatón a la hora de interaccionar con los vehículos.
Para garantizar la flexibilidad en la simulación de escenarios urbanos, el sistema permite la personalización de distintos aspectos del entorno, adaptándose a diferentes condiciones experimentales. Estas opciones incluyen tanto la señalización de la calle como la hora del día, la visibilidad que permiten los elementos de la calle (presencia de árboles, coches aparcados, contenedores de basura, etc.), o posibles distracciones tecnológicas, pudiendo simular el uso de teléfonos móviles o auriculares. De esta manera se puede analizar el impacto de todos estos factores en la atención, la percepción del entorno y, por tanto, en el comportamiento de la persona.
NUEVAS NECESIDADES DE DISEÑO PARA NUEVOS USOS DEL INTERIOR DEL VEHÍCULO
Nuevas tareas no relacionadas con la conducción
En los vehículos autónomos entran en juego las llamadas NDRT (Non Driving Related Tasks), es decir, todas esas tareas no relacionadas con la conducción que se podrán realizar cuando la intervención de la persona al volante sea mínima o nula: leer, dormir, trabajar, ver una película…
Así, la automatización de los vehículos permitirá a los pasajeros utilizar su tiempo de manera más cómoda y eficiente, mejorando su experiencia de viaje. Este cambio se traduce en un cambio de filosofía en el diseño de los interiores, posiblemente con una tendencia a transformar el vehículo en un “espacio habitable” que permita realizar esas actividades de trabajo, juegos, socialización e incluso de descanso que serán posibles mientras se viaja.
Esta transformación dará lugar a una amplia variedad de nuevas experiencias y cambios a bordo, entre las cuales se destaca un espacio interior configurable y versátil y una nueva experiencia ambiental donde los sistemas de iluminación, sonido y climatización podrán ajustarse automáticamente según situación y las preferencias individuales de los pasajeros, creando ambientes personalizados para cada viaje.
La relevancia de la postura corporal en el diseño del vehículo autónomo
Para el diseño ergonómico del interior del vehículo es importante disponer de avatares o maniquíes que simulen adecuadamente las posturas y movimientos que puede adoptar el usuario de vehículos autónomos. La aplicación de estos avatares es fundamental para el diseño de los asientos e interiores de los nuevos vehículos, así como de los sistemas de retención y seguridad de los pasajeros donde la postura adoptada es el parámetro clave en su diseño.
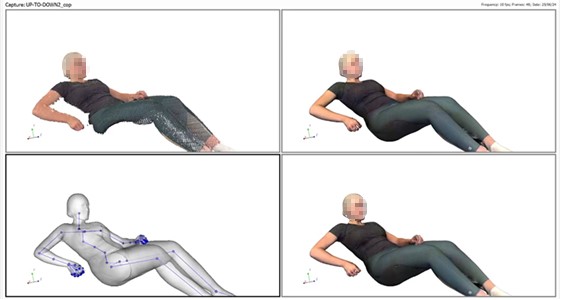
Figura 4. Ejemplo de generación de un maniquí completo a partir de la superficie corporal restante al eliminar el asiento.
Para el avance en el desarrollo de estos avatares, el IBV dispone de la tecnología para escanear el cuerpo de las personas con precisión, incluso en movimiento. Sin embargo, la tecnología disponible está diseñada para escanear el cuerpo visible, si está oculto por – por ejemplo – la zona de contacto del cuerpo con el asiento – aparecen complicaciones que dificultan la reconstrucción de la forma 3D.
Para resolver este problema se ha trabajado en una nueva metodología que permite obtener la forma 3D completa del cuerpo en movimiento incluso cuando hay partes del cuerpo ocultas por el asiento a partir del escáner Move4D desarrollado en el IBV. Gracias a esta metodología, la malla que representa el cuerpo de la persona escaneada se ajusta, representando tanto la pose como la deformación de los tejidos blandos en contacto con el asiento[1].
Interiores más sensibles
Los sonidos, olores y colores que captan nuestros sentidos influyen en el estado emocional, y pueden utilizarse en las cabinas de los vehículos para influir en el estado de los pasajeros.
En este sentido se ha recopilado el conocimiento existente en cuanto a los aspectos sensoriales de la cabina, principalmente los ligados a los estímulos olfativos, estímulos musicales y de iluminación.
En base a este conocimiento y los conocimientos previos existentes el IBV se ha definido una metodología para generar e inducir estados emocionales a partir de diferentes estímulos tales como iluminación, sonido y olores, generando ambientes tipo en cuanto a su relevancia en la conducción autónoma. Algunos ejemplos son el ambiente de alerta, cuando detecta que el conductor se encuentra en un estado somnoliento o dormido y es necesario despertarlo de forma urgente para la toma de control del vehículo, o bien generar ambiente de activación para trabajar, o ambiente del relax cuando el vehículo entra en modo de conducción autónoma.
La combinación del análisis de las posibles posturas adoptadas por las personas dentro del vehículo en función de la actividad que quieran realizar y de la influencia del ambiente en sus emociones es un punto de partida para el futuro diseño de los interiores de los vehículos autónomos.
VITALWISE: UNA HERRAMIENTA PARA CONOCER EL ESTADO DE LOS OCUPANTES
Los estados cognitivos tienen un impacto notable en los vehículos tradicionales o con nivel de automatización L2 o menor. Así, estados como somnolencia, fatiga activa o pasiva, estrés mental y alta carga mental incrementan significativamente el riesgo de accidentes. En vehículos autónomos, el impacto de estos estados cognitivos es menor conforme avanza el nivel de automatización, ya que la intervención de la persona al volante es cada vez más reducida en favor del control autónomo del vehículo. Sin embargo, en niveles intermedios de automatización como el L3, donde el conductor debe supervisar y estar listo para intervenir y retomar el control del vehículo, el efecto de los estados cognitivos sigue siendo especialmente relevante.
Por otro lado, el estado emocional de la persona a bordo del vehículo es especialmente relevante para niveles mayores de automatización, como L4 y L5. La conducción, más allá de su carácter funcional y utilitario, desencadena una serie de emociones en el conductor. En el caso de los vehículos autónomos, existe una clara diferencia con respecto a la conducción convencional en términos de las emociones experimentadas.
El estudio de las emociones en la conducción manual se centra en su relación con aspectos de seguridad y desempeño. Sin embargo, las emociones en la conducción autónoma para niveles avanzados de automatización, donde las personas actúan principalmente como pasajeras, pueden ser notablemente diferentes a las experimentadas durante la conducción manual. Por tanto, se hace necesario el estudio de las situaciones y factores de influencia que pueden impactar en la experiencia emocional de los ocupantes para el diseño de las metodologías más allá del enfoque de seguridad y funcionalidad.
Sin embargo, medir el estado cognitivo y emocional de las personas requiere de mediciones precisas de señales fisiológicas y de la expresión facial. Y, además, debe hacerse de forma no intrusiva, sin intervención sobre la persona evitando que tenga que estar equipada con incómodos sistemas de registro.
En este sentido, los avances realizados por el IBV han estado centrados en el desarrollo de algoritmos para sistemas de monitorización que permitan la caracterización fisiológica de la persona empleando cámaras dentro del vehículo, que funcionen en diferentes condiciones de iluminación y con el vehículo en movimiento.
Así, los modelos desarrollados en proyectos anteriores por el IBV se basan en el uso de cámaras RGB, que capturan información visual en el espectro visible, combinadas con señales fisiológicas para evaluar y analizar expresiones faciales y estados emocionales. Estos modelos han mostrado eficacia en condiciones de buena iluminación, como la luz diurna. Sin embargo, en entornos de nocturnidad, con baja visibilidad o condiciones cambiantes, las limitaciones de las cámaras RGB reducen la calidad de las imágenes, lo cual impacta negativamente en la precisión de las medidas.
Figura 5. VitalWise permite detectar gestos faciales y señales fisiológicas.
Para afrontar estos desafíos, se ha trabajado en el uso de cámaras de infrarrojo cercano (NIR, Near-Infrared) como una alternativa viable a las cámaras RGB en situaciones de baja luz. La tecnología NIR ofrece la posibilidad de capturar imágenes con un alto nivel de detalle en condiciones de nocturnidad, presentando así una oportunidad para adaptar los modelos de interpretación al estado de conductor y pasajero.
Dentro de la Red MEDUSA, por tanto, se ha trabajado en la mejora del procesado de las señales fisiológicas necesarias para conocer el estado de la persona, y en explorar la detección de información sobre expresiones faciales en imágenes NIR. Así, se han realizado pruebas empleando un vehículo real en la ciudad de València, aprovechando el Sandbox[2] que pone a disposición el Ayuntamiento de la ciudad. En estas pruebas han participado personas de diferente fisionomía y fototipo (color de la piel) para analizar la calidad de la detección de las señales fisiológicas y poder mejorar los algoritmos de VitalWise.

Figura 6. Pruebas realizadas, en el marco de la Red MEDUSA, con vehículo real dentro del Sandbox del Ayuntamiento de València.
CONCLUSIONES
En los próximos años el desarrollo de la nueva movilidad autónoma va a tener que superar numerosos retos. Desde el comportamiento de los vehículos, su adaptación a las personas que están en su interior y qué están sintiendo, su integración en la vía con otros ocupantes como son ciclistas o peatones, e incluso el diseño de su interior para adaptarse a las nuevas necesidades de los pasajeros.
Para poder avanzar en estos desarrollos es imprescindible contar con información precisa que permita caracterizar las necesidades y el comportamiento de las personas, tanto dentro como fuera del vehículo.
Sin embargo, poder estudiar estos aspectos en un entorno real no siempre es fácil, e incluso puede que ni siquiera sea posible. Hay situaciones que debido a su excepcionalidad y peligrosidad no pueden ser recreadas en contexto real y resulta necesario el uso de entornos inmersivos de simulación para su estudio.
Así, el IBV ha trabajado en el marco de la Red MEDUSA en desarrollar, mejorar y, en última instancia, poner a disposición de la industria y la sociedad herramientas y metodologías que permitan avanzar en el diseño de la movilidad autónoma. Desde entornos de simulación de elevado realismo e inmersividad como HAV o el laboratorio de peatones dentro del Entorno Inmersivo de Movilidad, a herramientas para conocer el estado de la persona como VitalWise y las necesidades de diseño interior de vehículos a través de posturas y su influencia en la satisfacción y confort de las personas a bordo.
Gracias a todas estas líneas de innovación en las que se ha trabajado este último año y medio en la Red Medusa, el IBV se encuentra en un momento clave para contribuir al desarrollo de una Movilidad Autónoma Conectada y Cooperativa CCAM que ponga a la persona en el centro. Una nueva movilidad empática con el usuario, respetuosa con el resto de personas en la vía y que maximice la satisfacción de la sociedad como conjunto.
Proyecto (CER-20231011) reconocido como Red de Excelencia CERVERA, financiado por el Ministerio de Ciencia, Innovación y Universidades a través del Centro para el Desarrollo Tecnológico y la Innovación E.P.E.(CDTI), con cargo al Mecanismo de Recuperación y Resiliencia (MRR) de la Unión Europea.

AGRADECIMIENTOS
A los socios de la Red Medusa, los centros tecnológicos CTIC, IKERLAN y TECNALIA, así como al Ayuntamiento de València por su colaboración con el proyecto poniendo a disposición del IBV el Sandbox de la ciudad.
BIBLIOGRAFÍA
[1] Valero, J. et al. (2023). Bridging the Gap Between Body Scanning and Ergonomic Simulation of Human Body Interaction in Autonomous Car Interiors. In: Scataglini, S., Harih, G., Saeys, W., Truijen, S. (eds) Advances in Digital Human Modeling DHM 2023. Lecture Notes in Networks and Systems, vol 744. Springer, Cham. https://doi.org/10.1007/978-3-031-37848-5_4
[2] https://www.valencia.es/web/sandbox
BERTHA project – Behavioural ReplicaTion of Human drivers for CCAM (https://berthaproject.eu/)
CCAM States Representatives Group (https://www.ccam.eu/what-is-ccam/governance/ccam-states-representatives-group/)
Connected Cooperative Automated Mobility Partnership (2022) CCAM Strategic Research and Innovation Agenda (2022)
DIAMOND project – Revealing actionable knowledge from data (https://diamond-project.eu)
European Commission (2013). Options for strengthening responsible research and innovation
Niemelä, M., Ikonen, V., Leikas, J., Kantola, K., Kulju, M., Tammela, A., & Ylikauppila, M. (2014). Human-driven design: a human-driven approach to the design of technology. In ICT and Society: 11th IFIP TC 9 International Conference on Human Choice and Computers, HCC11 2014, Turku, Finland, July 30–August 1, 2014. Proceedings 11 (pp. 78-91). Springer Berlin Heidelberg.
SAE J3016™ Recommended Practice: Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles
SuaaVE project – Colouring automated driving with human emotions (https://www.suaave.eu)
Valero, J. et al. (2023). Bridging the Gap Between Body Scanning and Ergonomic Simulation of Human Body Interaction in Autonomous Car Interiors. In: Scataglini, S., Harih, G., Saeys, W., Truijen, S. (eds) Advances in Digital Human Modeling DHM 2023. Lecture Notes in Networks and Systems, vol 744. Springer, Cham. https://doi.org/10.1007/978-3-031-37848-5_4
AFILIACIÓN DE LOS AUTORES
Instituto de Biomecánica de Valencia
Universitat Politècnica de València
Edificio 9C. Camino de Vera s/n
(46022) Valencia. Spain
CÓMO CITAR ESTE ARTÍCULO
Autor/es: Luis I. Sánchez Palop, Begoña Mateo Martínez, José Solaz Sanahuja, Elisa Signes i Pérez (25 de Junio de 2025). «Por una conducción autónoma segura y confiable: los avances del IBV dentro del proyecto MEDUSA». Revista de Biomecánica nº 72. https://www.ibv.org/por-una-conduccion-autonoma-segura-y-confiable-los-avances-del-ibv-dentro-del-proyecto-medusa/

La publicación de este artículo está financiada por la Línea Nominativa S1048 “Centros Tecnológicos de la Comunitat Valenciana. Apoyo por objetivos.” de los Presupuestos de la Generalitat para 2025 (IMAMCA/2025/7).