Aplicación de la IA en el análisis de movimientos humanos
17 diciembre 2025.
Autor/es: Mario Lamas Rodríguez, Juan López Pascual, Eduardo Parrilla Bernabé, Francisco Parra González, Ignacio Bermejo Bosch, Beatriz Fernández Gallo.
Instituto de Biomecánica (IBV)
La captura de movimientos humanos es una herramienta fundamental en medicina, rehabilitación, ergonomía y deporte al permitir describir de forma cuantitativa cómo se mueven las personas. La tecnología Markerless se está postulando como una alternativa en el análisis de movimiento dado su menor tiempo de ejecución y coste computacional. Sin embargo, los algoritmos de detección de pose disponibles no proporcionan la información suficiente para realizar un análisis biomecánico, no pudiendo aprovechar las ventajas que supone. Ante esta situación, se presenta la necesidad de desarrollar una herramienta que pueda aprovechar las virtudes de esta tecnología en el ámbito de la biomecánica.
El objetivo del presente artículo es, por un lado, explicar cómo la inteligencia artificial (IA), en particular los algoritmos de Deep Learning, se están empleando en sistemas markerless para registrar movimientos de una manera más sencilla y cómoda; y, por otro lado, presentar el Markerless IBV, una herramienta capaz de realizar un análisis biomecánico con esta tecnología, potenciando sus virtudes.
INTRODUCCIÓN
Los sistemas markerless estiman la posición y orientación del cuerpo usando cámaras y algoritmos de detección de pose. A diferencia de la fotogrametría convencional, en la que hay que colocar esferas reflectantes en la piel, un sistema markerless emplea redes neuronales entrenadas con miles de imágenes etiquetadas para poder detectar automáticamente puntos anatómicos.
Estos sistemas poseen una serie de ventajas respecto a la fotogrametría, postulándose como una alternativa real en el análisis del movimiento humano. Por un lado, eliminan la necesidad de realizar una instrumentación del sujeto y el tiempo asociado a la colocación de marcadores en los puntos anatómicos concretos. Esta característica agiliza la preparación de las sesiones y aumenta la comodidad para el participante, además de prescindir de la necesidad de un valorador experimentado en la localización de las áreas anatómicas concretas y el error asociado. Por otro lado, la captura es en tiempo real, donde no es necesaria la identificación manual de los marcadores, y el coste es menor. Al basarse únicamente en cámaras y algoritmos, los requerimientos de hardware son menores y el sistema puede funcionar en ordenadores de gama media. Además, al no depender de marcadores, es posible analizar movimientos con vestimenta habitual, en espacios distintos al laboratorio o en exteriores, lo cual abre la puerta a evaluaciones en entornos más realistas.
Sin embargo, estos sistemas dependen en gran medida del entrenamiento al que se hayan sometido las redes neuronales. Dicho entrenamiento se realiza proporcionando ejemplos etiquetados (ver Figura 1) con los que puedan definir patrones que después puedan utilizar en el etiquetado de nuevas imágenes. Este “aprendizaje basado en ejemplos” permite que el algoritmo etiquete automáticamente posturas futuras [1]. Por tanto, el rendimiento de la detección de pose por parte de estas redes depende, en gran medida, de las bases de datos utilizadas para su entrenamiento. Muchas bases de datos de imágenes disponibles, así como los modelos de puntos que incluyen, fueron diseñadas para animación o visión artificial y no para aplicaciones biomecánicas. Estas bases etiquetan únicamente un subconjunto de articulaciones (cadera, rodilla, tobillo, hombro) y tratan segmentos completos como estructuras rígidas, lo que genera errores al estimar centros articulares y longitudes de segmentos. Además, las etiquetas suelen realizarse por personal sin formación anatómica, no pasan por una segunda verificación y requieren que los puntos se marquen incluso cuando no son visibles, produciendo inconsistencias y errores sistemáticos [1].

Figura 1. Ejemplos de imágenes etiquetadas de las bases de datos.
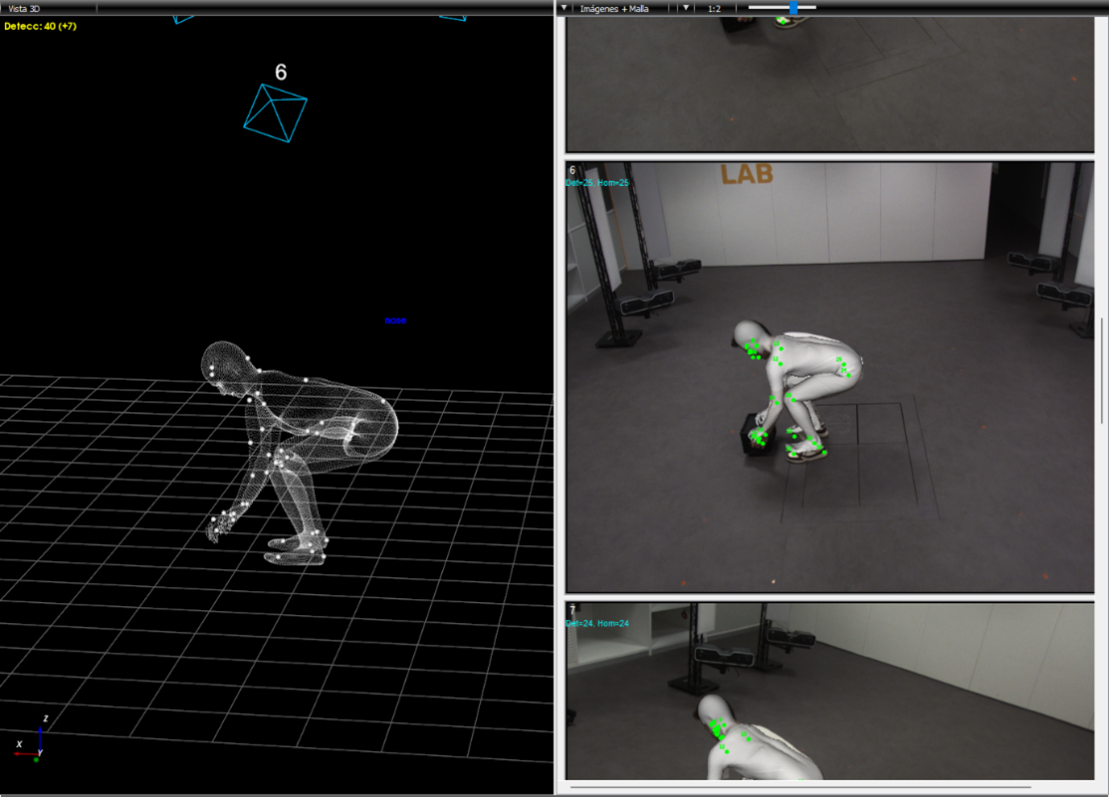
Como ejemplos de algoritmos de detección de pose están OpenPose y MediaPipe (ver Figura 2). OpenPose [2] fue uno de los primeros algoritmos de código abierto capaces de detectar múltiples personas a partir de una sola imagen y estimar 18 o más puntos corporales por individuo. Esta red neuronal convolucional utiliza representaciones de afinidad para agrupar las articulaciones de cada persona. La precisión de OpenPose ha permitido su adopción en deportes y animación, pero la red tiene un alto coste computacional. Además, incluir la detección de manos y cara incrementa el consumo de memoria y reduce la velocidad de procesamiento.
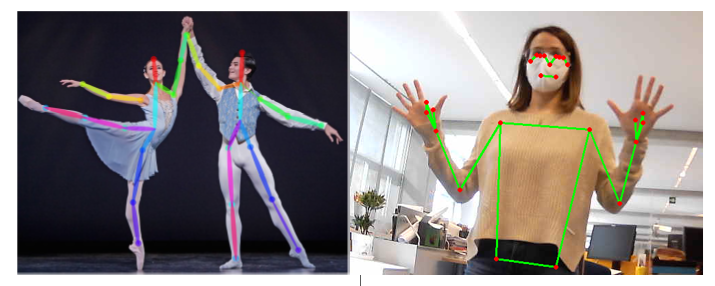
Figura 2. Detección de los puntos anatómicos dado el algoritmo de detección OpenPose (izquierda) [2] y el de Mediapipe (derecha).
MediaPipe [3] es una biblioteca de Google diseñada para ejecutar modelos de detección de pose en dispositivos móviles. Utiliza una red más ligera que la de OpenPose que predice directamente las coordenadas de 33 puntos clave. MediaPipe está optimizado para dispositivos con CPU y GPU limitadas y es de código abierto, lo que facilita su implementación en una mayor variedad de aplicaciones.
Ambos algoritmos permiten una detección de la pose en 2D, pero se podría llevar al 3D, aumentado sus prestaciones. A partir de la disposición de dos o más cámaras en un espacio calibrado y la aplicación de un algoritmo de detección de pose, es posible obtener los puntos 3D, pudiendo utilizarse para un análisis biomecánico de gestos completos.
Sin embargo, uno de los inconvenientes de estos algoritmos es que no están diseñados para análisis biomecánicos detallados. En el caso particular de OpenPose y Mediapipe, estos detectan entre 18 y 33 puntos, insuficientes para definir ejes anatómicos completos, y sus bases de datos no están pensadas para biomecánica [1]. En consecuencia, para obtener los ángulos articulares en los tres ejes es necesario aplicar un proceso de marker augmentation [4], es decir, aumentar el número de marcadores combinando los puntos detectados con modelos antropométricos (ver Figura 3). Por lo que es necesario desarrollar una herramienta que permita extraer esta información para poder realizar el análisis necesario.
Figura 3. Marker augmentation a partir de los puntos obtenidos por el algoritmo de pose [4].
DESARROLLO
MARKERLESS IBV
Para superar las limitaciones anteriores, el Instituto de Biomecánica (IBV) ha desarrollado el Markerless IBV, una herramienta capaz de realizar un análisis biomecánico a partir de tecnología markerless. Esta herramienta está basada en el Move4D, un escáner dinámico compuesto por 12 a 16 módulos fotogramétricos con cámaras infrarrojas y luz integrada que es capaz de generar secuencias de mallas 3D sin marcadores con una precisión comparable a fotogrametría [5], [6].
Esta herramienta se basa en la definición de un modelo paramétrico humano [7] que permite asociar a cada sujeto un avatar. Este avatar (ver Figura 4) está formado por una malla de 50.000 puntos asociada a un esqueleto interno de 63 articulaciones, definiendo la forma (dimensiones y volumen del cuerpo) y la pose (posición y orientación de cada segmento) del sujeto.
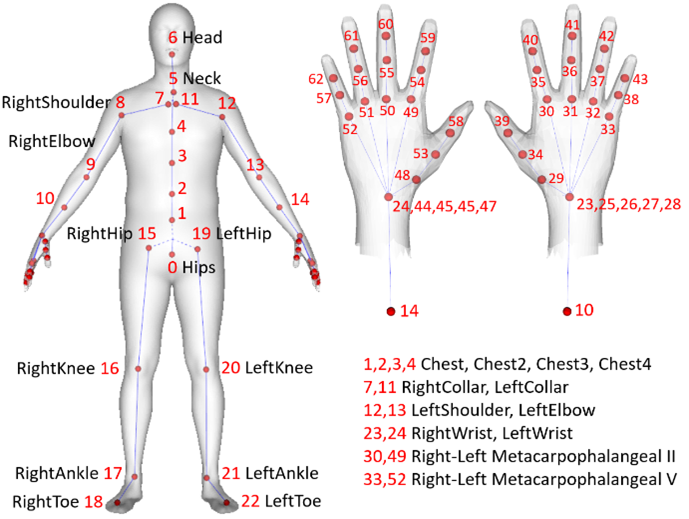
Figura 4. Esquema de modelo paramétrico humano [7]. Consta de una malla de 49530 vértices y de un esqueleto interno de 63 articulaciones.
La definición de este avatar consta de dos etapas: la definición de la forma y el posterior ajuste de la pose y la forma al gesto realizado. En primer lugar se busca definir la pose a partir de una A-pose del sujeto medido, del cual se extraen los puntos de Mediapipe. Mediante técnicas de análisis de componentes principales (PCA) y regresión multivariante, se calcula una forma aproximada a partir de variables antropométricas básicas (edad, sexo, peso y altura) basada en una base de datos de más de 20.000 sujetos en A-poses medidos con el Move4D (ver Figura 5). La forma estimada se ajusta luego a los marcadores 3D obtenidos con MediaPipe, corrigiendo la forma del modelo y ajustándola a la Apose (ver Figura 6).
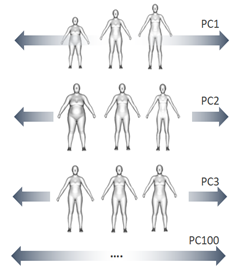
Figura 5. Aplicación del PCA para obtener la forma del modelo más acorde a las medidas antropométricas proporcionadas (peso, altura, sexo y edad) [7].
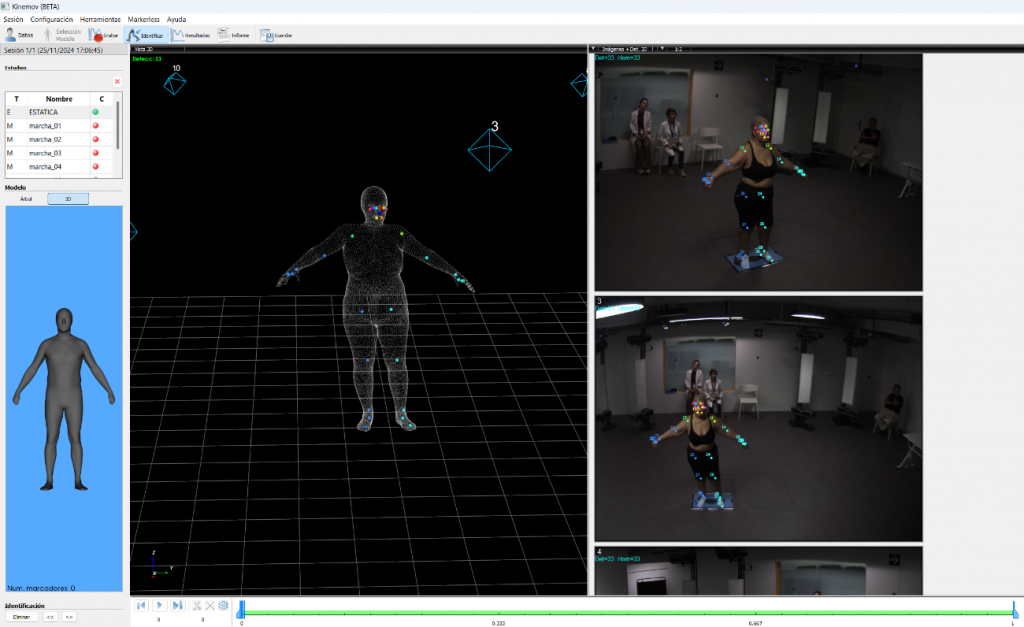
Figura 6. Ajuste del modelo dada la secuencia de marcadores 3D de la postura 3D y los datos antropométricos del paciente.
Una vez se tiene la forma del sujeto, el siguiente paso es el ajuste de la pose y la forma. El avatar inicial se deforma para coincidir con los marcadores 3D obtenidos por Mediapipe, ayudándose de dos bases de datos con medidas de hombres y mujeres realizando una serie de gestos. Se imponen restricciones a las articulaciones para mantener la coherencia anatómica (ver Figura 7). Así se obtienen la malla definitiva y el esqueleto interno que describen la postura exacta del movimiento medido (ver Figura 8).
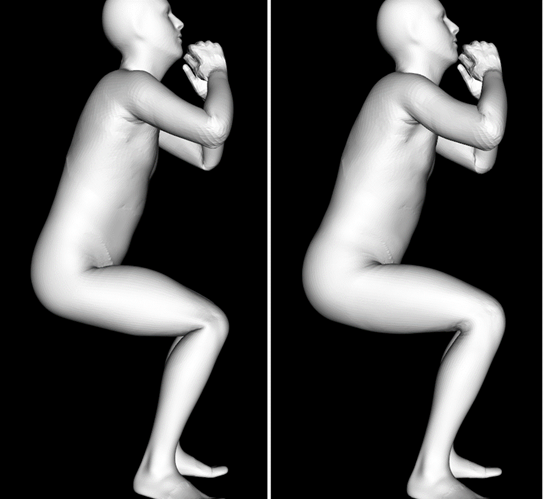
Figura 7. Deformación irreal de los avatares tras ajustarlos al gesto realizado (izquierda) y corrección de dicha deformación a partir de la aplicación de estas restricciones.
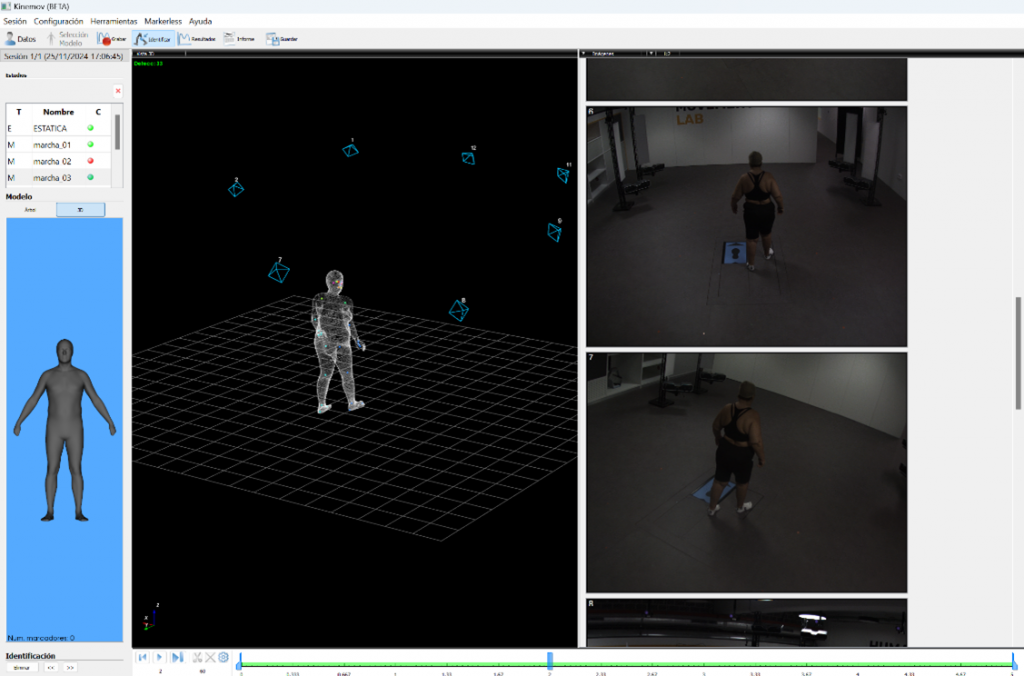
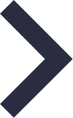
Figura 8. Captura de una marcha del sujeto y su inferencia de los 33 puntos de mediapipe (arriba). Inferencia de los 33 puntos 3D a partir de las 12 cámaras.
Una vez generada la malla paramétrica, cada vértice puede asociarse a uno de los marcadores de un modelo biomecánico previamente definido, obteniendo la distribución de los marcadores en el espacio durante el movimiento (ver Figura 9). Esto permite calcular ángulos articulares, trayectorias de segmentos y otras variables biomecánicas de interés para el análisis.
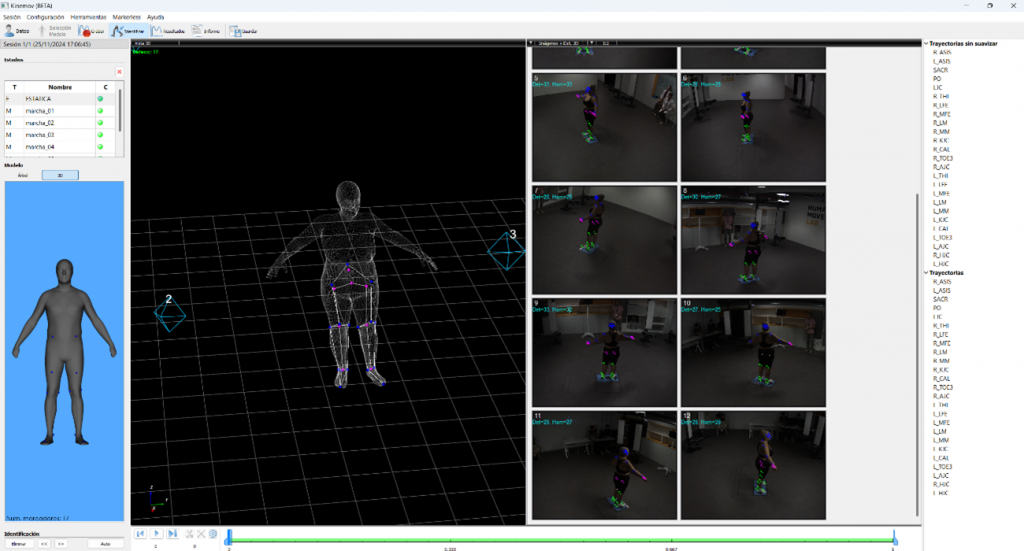
Figura 9. Integración de los modelos biomecánicos en el avatar.
APLICACIONES ACTUALES DE LA TECNOLOGÍA
La implementación del Markerless en Kinemov ha permitido la exploración de este sistema de medida en ámbitos como el deporte, la ergonomía y la bioingeniería. La mayor versatilidad de esta tecnología permite una mayor variedad de indumentarias, pudiendo recrear escenarios más realistas.
En el caso del deporte, se ha realizado un análisis biomecánico de un ciclista en una bicicleta con rodillo. Mediante esta tecnología, se ha buscado analizar la técnica, la eficiencia, el rendimiento y el riesgo de lesión de un ciclista.
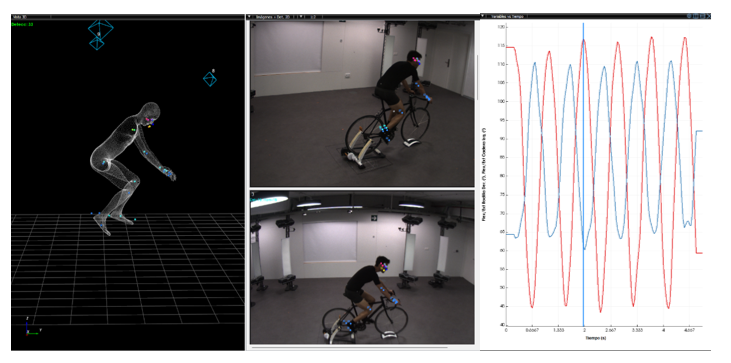
Figura 10. Análisis biomecánico de un ciclista en una bicicleta con rodillo.
En el caso de la ergonomía, el sistema permite la simulación de gestos durante la realización de una actividad laboral y analizar los riesgos que suponen. Esta tecnología permite realizar análisis ergonómicos de escenarios más realistas, pudiendo detectar posibles factores de riesgo presentes en los puestos de trabajo.
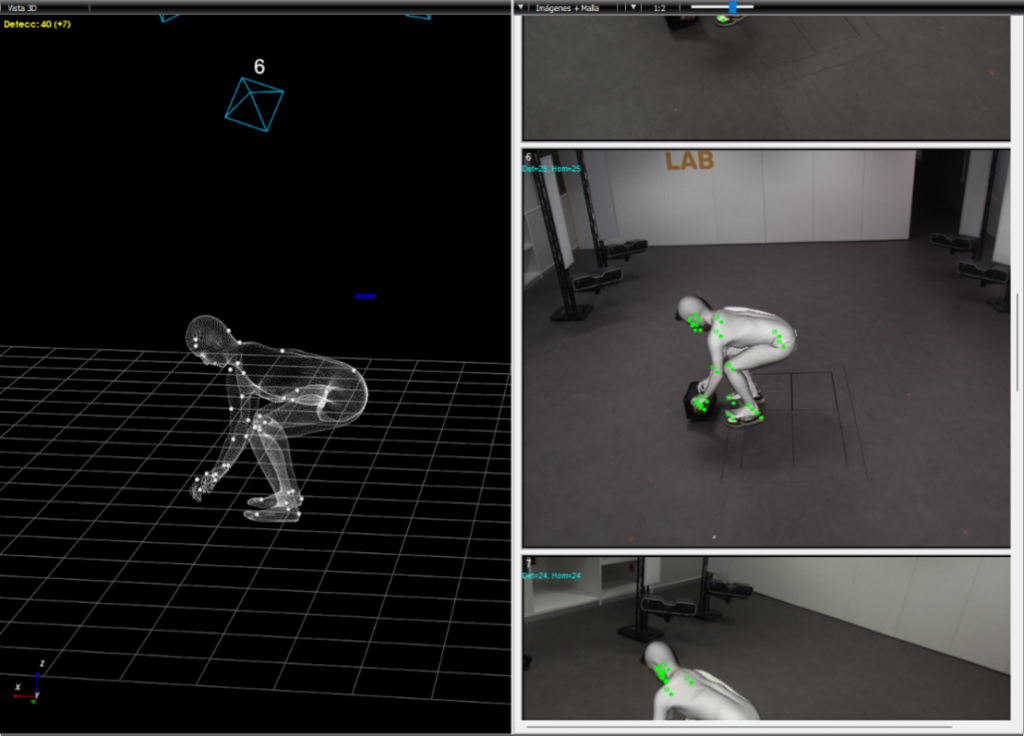
Figura 11. Análisis ergonómico de un trabajador en su puesto de trabajo.
Otra de las aplicaciones de esta tecnología es el análisis de valoración funcional de pacientes. Analizando un estudio de la marcha de un paciente con una hemiparesia con markerless, se ha detectado diferencias entre el lado sano y el lado patológico, lo que señala el potencial de esta tecnología como herramienta de diagnóstico en la valoración funcional.
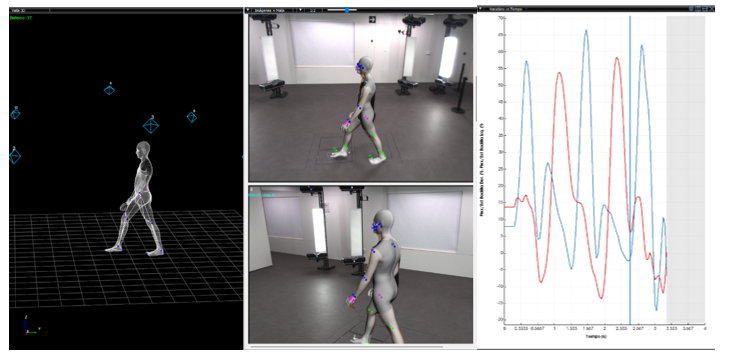
Figura 12. Análisis biomecánico de un estudio de la marcha de un paciente con una hemiparesia.
Si se consigue mejorar la precisión de esta tecnología con unas redes neuronales más robustas, se podría utilizar como herramienta de diagnóstico y seguimiento de tratamientos en el campo de la valoración funcional. Además, su mayor rapidez en el análisis frente al método tradicional se traduciría en una evaluación de un tratamiento más inmediata, pudiendo dar una respuesta más reactiva y acelerar la recuperación del paciente. Por lo tanto, siempre y cuando cumpla la Regulación de Producto Sanitario, se podría desarrollar un producto sanitario de aplicación clínica de valoración funcional con esta tecnología.
Alguna de las ventajas de esta tecnología es la posibilidad que brinda de poder realizar medidas fuera del laboratorio, permitiendo una democratización del análisis biomecánico.
Uno de los estudios realizados con la solución Markerless en Kinemov, se llevó a cabo en un balneario, donde se evaluó a los propios usuarios con el objetivo de analizar su estado funcional. A diferencia de la metodología tradicional, la agilidad en la toma de medidas y su mayor flexibilidad aporta una mayor adherencia a la tecnología.
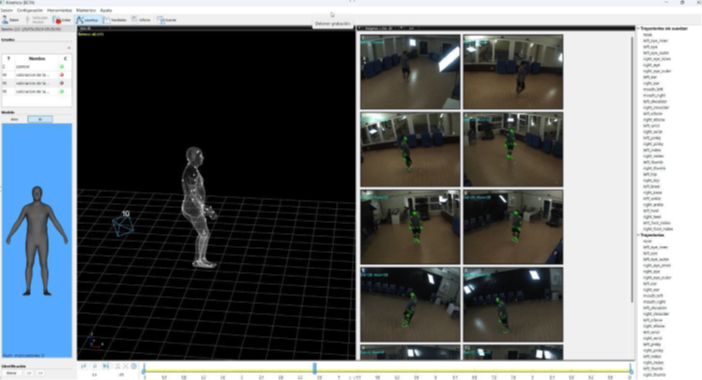
Figura 13. Análisis biomecánico de la marcha en un entorno ajeno del laboratorio.
PRÓXIMOS PASOS
El sistema actual para la detección de pose y la definición del HO-Model (Human-Object Model) en el sistema markerless emplea la red MediaPipe. Esta red destaca por ser gratuita para usos comerciales y por ser muy ligera, permitiendo su uso en dispositivos móviles. Sin embargo, no es una red especialmente robusta ni fiable, lo que penaliza el desarrollo de aplicaciones sofisticadas en el ámbito de la biomecánica.
Para superar las limitaciones de las soluciones de terceros, se está desarrollando una red neuronal de detección de pose propia y especializada. Esta red busca superar las prestaciones de robustez y fiabilidad de alternativas como MediaPipe y OpenPose. Esta nueva red permitirá un etiquetado automático y optimizado utilizando la base de datos Move4D.
La implementación de esta red de detección de pose logrará una precisión significativamente superior en la detección de la pose al estar diseñada y entrenada específicamente para el objetivo del proyecto, eliminando la dependencia de redes genéricas de terceros. Además, ganará una mayor versatilidad para aceptar diversos tipos de datos de entrada, incluyendo, además de las imágenes RGB, información de mapas de profundidad Lidar y cámaras térmicas.
CONCLUSIONES
La IA se está postulando como una alternativa a la fotogrametría en el análisis del movimiento humano. Los sistemas markerless permiten registrar movimientos sin instrumentar al sujeto, reduciendo costes y mejorando la comodidad. Sin embargo, los algoritmos de detección de pose más populares, como OpenPose y MediaPipe, no proporcionan suficientes puntos para proporcionar análisis biomecánicos detallados. Además, su rendimiento depende de bases de datos que no están diseñadas para reflejar la diversidad de movimientos y poblaciones.
Para superar estas limitaciones, el Markerless IBV combina el escáner Move4D, mallas densas y modelos paramétricos entrenados con datos antropométricos. Esta solución genera un avatar compuesto por decenas de articulaciones y permite calcular variables cinemáticas comparables a las de un sistema con marcadores.
El IBV está trabajando en la implementación de esta tecnología en diversas aplicaciones, , lo que abrirá la puerta a su uso en rehabilitación, investigación y entrenamiento deportivo. En un futuro no muy lejano se espera que los profesionales de la salud y del deporte podrán disponer de esta tecnología para obtener evaluaciones más rápidas, objetivas y cómodas.
BIBLIOGRAFIA
[1] L. Wade, L. Needham, P. McGuigan, and J. Bilzon, ‘Applications and limitations of current markerless motion capture methods for clinical gait biomechanics’, PeerJ, vol. 10, p. e12995, Feb. 2022, doi: 10.7717/peerj.12995.
[2] Z. Cao, G. Hidalgo, T. Simon, S.-E. Wei, and Y. Sheikh, ‘OpenPose: Realtime Multi-Person 2D Pose Estimation using Part Affinity Fields’, May 30, 2019, arXiv: arXiv:1812.08008. doi: 10.48550/arXiv.1812.08008.
[3] C. Lugaresi et al., ‘MediaPipe: A Framework for Building Perception Pipelines’, Jun. 14, 2019, arXiv: arXiv:1906.08172. doi: 10.48550/arXiv.1906.08172.
[4] S. D. Uhlrich et al., ‘OpenCap: 3D human movement dynamics from smartphone videos’, Jul. 10, 2022, bioRxiv. doi: 10.1101/2022.07.07.499061.
[5] A. V. Ruescas Nicolau, H. De Rosario, F. Basso Della-Vedova, E. Parrilla Bernabé, M.-C. Juan, and J. López-Pascual, ‘Accuracy of a 3D temporal scanning system for gait analysis: Comparative with a marker-based photogrammetry system’, Gait Posture, vol. 97, pp. 28–34, Sep. 2022, doi: 10.1016/j.gaitpost.2022.07.001.
[6] A. V. Ruescas-Nicolau, H. De Rosario, E. P. Bernabé, and M.-C. Juan, ‘Positioning errors of anatomical landmarks identified by fixed vertices in homologous meshes’, Gait Posture, vol. 108, pp. 215–221, Feb. 2024, doi: 10.1016/j.gaitpost.2023.11.024.
[7] E. Parrilla, A. Ballester, J. Uriel, A. V. Ruescas-Nicolau, and S. Alemany, Capture and Automatic Production of Digital Humans in Real Motion with a Temporal 3D Scanner. The Eurographics Association, 2024. Accessed: Oct. 15, 2025. [Online]. Available: https://doi.org/10.2312/cl.20241048
AFILIACIÓN DE LOS AUTORES
Instituto de Biomecánica de Valencia
Universitat Politècnica de València
Edificio 9C. Camino de Vera s/n
(46022) Valencia. Spain
CÓMO CITAR ESTE ARTÍCULO
Autor/es: Mario Lamas Rodríguez, Juan López Pascual, Eduardo Parrilla Bernabé, Francisco Parra González, Ignacio Bermejo Bosch, Beatriz Fernández Gallo. (17 de Diciembre de 2025). «Aplicación de la IA en el análisis de movimientos humanos”. Revista de Biomecánica nº 72. https://www.ibv.org/actualidad/move4d-la-tecnologia-de-escaneado-dinamico-que-cuantifica-el-efecto-de-las-prendas-de-compresion-en-corredores/

La publicación de este artículo está financiada por la Línea Nominativa S1048 “Centros Tecnológicos de la Comunitat Valenciana. Apoyo por objetivos.” de los Presupuestos de la Generalitat para 2025 (IMAMCA/2025/7).